|
From the book „Human abilities of machines“ 1971:
As the governments
of the European states have not supported development of use of a
nuclear energy for researches of a cosmos, then did not suffice support
and means for creation of freely moving machines with hands.
However the branch of laboratory CNEN
in Italy has created in 1960 under the direction of engineer K.Manchini
interesting machine MASCOT (from Manipolatore Servo Controllate Transistorizzato - a servo-controlled transistorized manipulator).
This device is of the same type as Goertz's designs, but with some improvements.
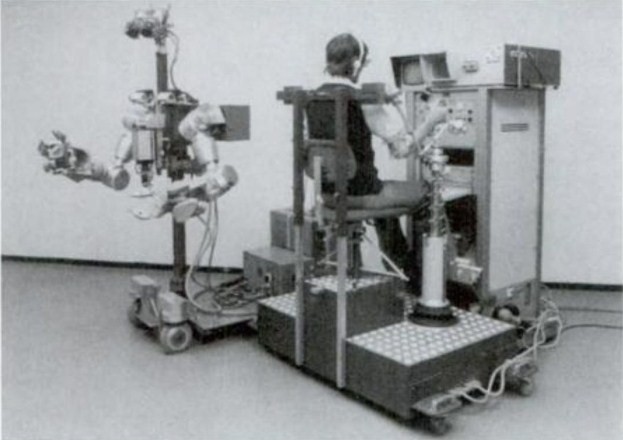
It has two arms with two-way tracking systems mounted on a movable "doll".
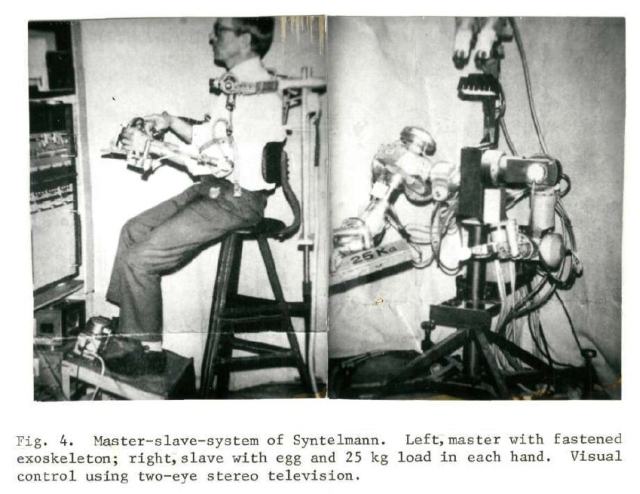
The operator works sitting at the console supplied with the screen of the stereo televisor, and
conducts work, manipulating managing hands of the console and pedals,
that command the movements robot. The operator subconsciously integrates
the sensations in managing influences on the robot. The only drawback of this device is that it needs
a smooth platform without obstacles to work. Nevertheless, from all devices of similar type
МАSCОТ is, from the engineering point of view, most aesthetically
perfect - the machine gives the impression of being so human-like that
there is a desire to give instructions not to the human-operator, but directly for the
machine.
And else the information on the given question from last times: |
|
Из книги „Человеческие способности
машин“ 1971 г.:
Поскольку правительства европейских государств не
поддержали разработок по применению ядерной энергии для исследований
космоса, средств и поддержки для создания свободно движущихся машин с
руками не хватало.
Однако отделение лаборатории
CNEN Италии создало в 1960 году под
руководством инженера К. Манчини интересную машину МАСКОТ (от
Manipolatore Servo Controllate Transistorizzato
— серво-управляемый манипулятор на
транзисторах). Это устройство того же типа, что и конструкции Гёрца, но
с некоторыми усовершенствованиями. Оно имеет две руки с двусторонними
следящими системами, укрепленными на подвижной "кукле". Оператор
работает сидя у консоли, снабженной экраном стереотелевизора, и ведет
работу, манипулируя управляющими руками консоли и педалями, командующими
перемещениями. Оператор подсознательно интегрирует свои ощущения в
управляющие воздействия на робота. Единственным недостатком этого
устройства является то, что для работы ему необходима гладкая площадка
без препятствий. Тем не менее, из всех устройств подобного типа МАСКОТ
является, с инженерной точки зрения, наиболее эстетически совершенным -
машина производит впечатление настолько человекоподобной, что возникает
желание давать указания не оператору а самой машине.
И ещё информация по данному вопросу из прошлых времён: |